Grasp Reset Mechanism
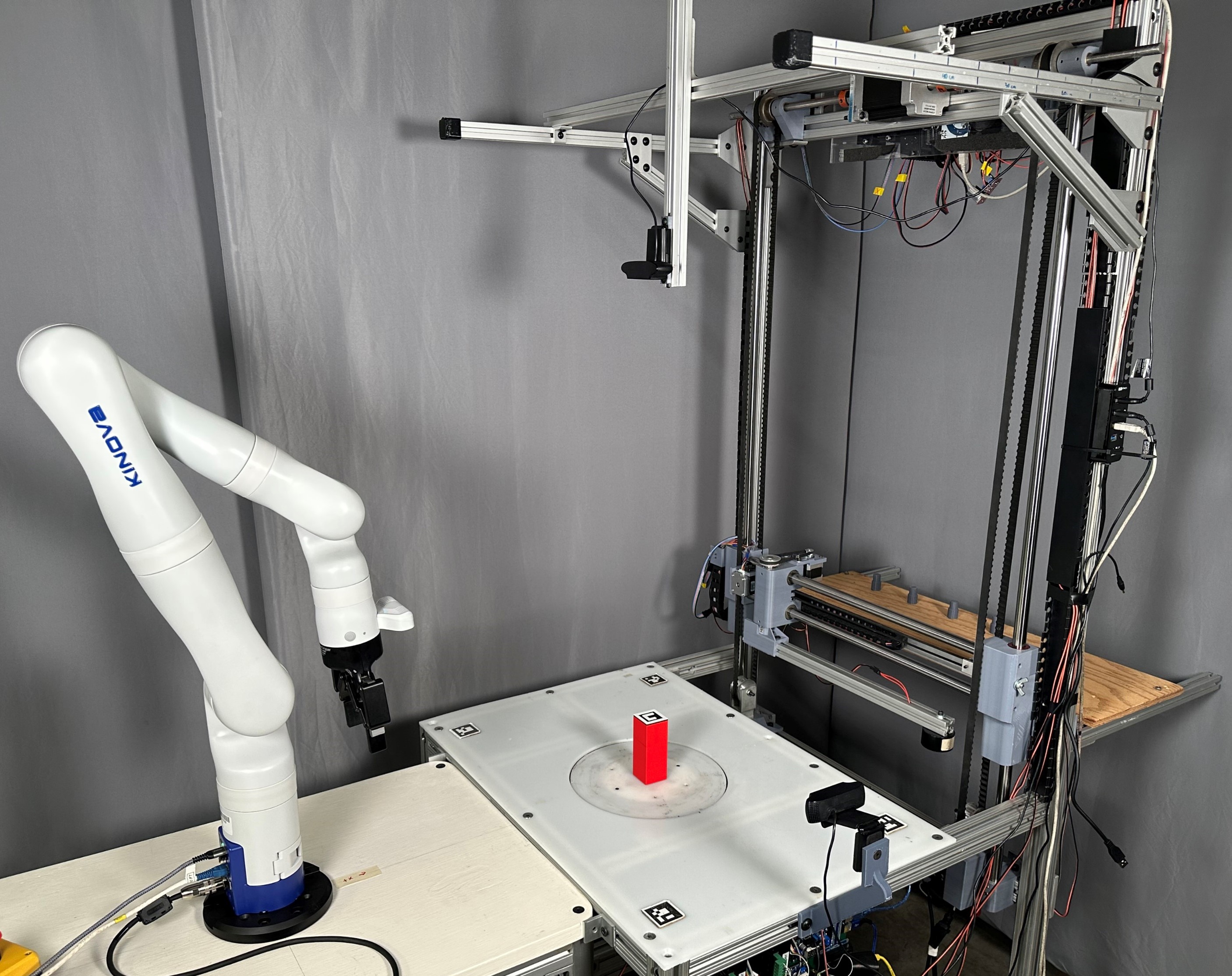
The Grasp Reset Mechanism (GRM) resets an object to a home position and a variable orientation. It also swaps between objects, collects data, and interfaces with a variety of manipulators. The GRM was designed to enable large scale grasping trials — whether for benchmarking, testing, training learning models, or generating datasets.
The following sections will provide detailed documentation about the mechanism and its software.
CAD
NOTE: Full rendering with be added here shortly.
A complete CAD assembly (Solidworks 2023) and bill of materials (Excel) of the mechanism are available at this link, and embedded below.
Electrical
Schematics for the entire mechanism, and Gerber PCB files are available here.